4.3 内存访问模式
发表于 2018-05-03 | 分类于 CUDA,Freshman | 评论数: 0 | 阅读次数:
Abstract: 本文介绍内存的访问过程,也就是从应用发起请求到硬件实现的完整操作过程,这里是优化内存瓶颈的关键之处,也是CUDA程序优化的基础。
Keywords: 内存访问模式,对齐,合并,缓存,结构体数组,数组结构体
内存访问模式
"物有本末,事有终始,知所先后,则近道矣" ——《大学·大学之道章》
这句话出自《大学》,对于技术学习也有启发意义。在学习过程中,理解事物的本质和发展规律,把握学习的先后顺序,才能更好地掌握知识。
对于CUDA编程来说,内存访问模式是性能优化的基础,是"本";而各种具体的优化技巧是"末"。只有深入理解内存访问的本质规律,才能在实际编程中运用各种优化技术。
今天我们要学习的是CUDA中最重要的课程之一,本文将通过一些简单通俗、但足够恰当的比喻和实例,让大家更容易理解。
多数GPU程序容易受到内存带宽的限制,所以最大程度地利用全局内存带宽,提高全局加载效率,是调控内核函数性能的基本条件。如果不能正确调控全局内存使用,那么优化方案可能收效甚微。
CUDA执行模型告诉我们,CUDA执行的基本单位是线程束,所以,内存访问也是以线程束为基本单位发布和执行的。我们本文研究的就是一个线程束的内存访问,不同线程的内存请求,其目标位置的不同,可以产生非常多种情况。所以本篇就是研究这些不同情况,以及如何实现最佳的全局内存访问。
注意:访问可以是加载,也可以是存储。
对齐与合并访问
全局内存通过缓存实现加载和存储的过程如下图:
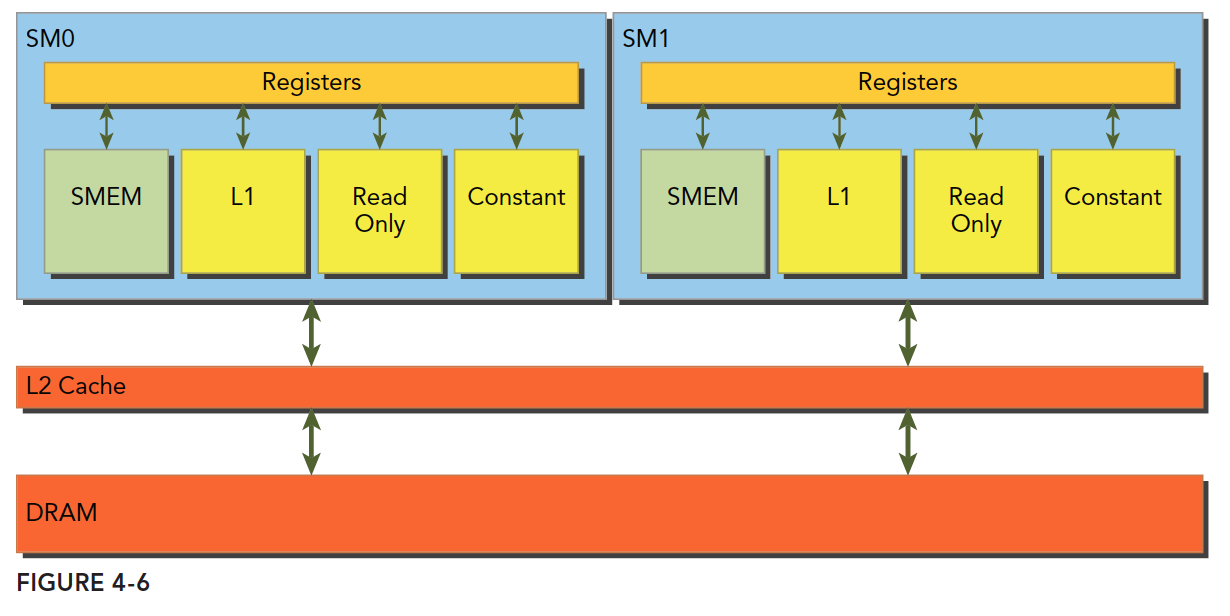
全局内存是一个逻辑层面的模型,我们编程的时候有两种模型考虑:一种是逻辑层面的,也就是我们在写程序的时候(包括串行程序和并行程序),写的一维(多维)数组、结构体、定义的变量,这些都是在逻辑层面的;一种是硬件角度,就是一块DRAM上的电信号,以及最底层内存驱动代码所完成的数字信号处理。
L1表示一级缓存,每个SM都有自己的L1,但是L2是所有SM公用的,除了L1缓存外,还有只读缓存和常量缓存,这个我们后面会详细介绍。
核函数运行时需要从全局内存(DRAM)中读取数据,只有两种粒度,这个是关键的:
- 128字节
- 32字节
解释下"粒度",可以理解为最小单位,也就是核函数运行时每次读内存,哪怕是读一个字节的变量,也要读128字节,或者32字节,而具体是32还是128还是要看访问方式:
- 使用一级缓存
- 不使用一级缓存
对于CPU来说,一级缓存或者二级缓存是不能被编程的,但是CUDA是支持通过编译指令停用一级缓存的。如果启用一级缓存,那么每次从DRAM上加载数据的粒度是128字节,如果不使用一级缓存,只使用二级缓存,那么粒度是32字节。
还要强调一下CUDA内存模型的内存读写,我们现在讨论的都是单个SM上的情况,多个SM只是下面我们描述的情形的复制:SM执行的基础是线程束,也就是说,当一个SM中正在被执行的某个线程需要访问内存,那么,和它同线程束的其他31个线程也要访问内存,这个基础就表示,即使每个线程只访问一个字节,那么在执行的时候,只要有内存请求,至少是32个字节,所以不使用一级缓存的内存加载,一次粒度是32字节而不是更小。
在优化内存的时候,我们要最关注的是以下两个特性:
- 对齐内存访问
- 合并内存访问
我们把一次内存请求——也就是从内核函数发起请求,到硬件响应返回数据这个过程称为一个内存事务(加载和存储都可以)。
当一个内存事务的首个访问地址是缓存粒度(32或128字节)的偶数倍的时候:比如二级缓存32字节的偶数倍64,128字节的偶数倍256的时候,这个时候被称为对齐内存访问,非对齐访问就是除上述的其他情况,非对齐的内存访问会造成带宽浪费。
当一个线程束内的线程访问的内存都在一个内存块里的时候,就会出现合并访问。
对齐合并访问的状态是理想化的,也是最高效的访问方式,当线程束内的所有线程访问的数据在一个内存块,并且数据是从内存块的首地址开始被需要的,那么对齐合并访问出现了。为了最大化全局内存访问的理想状态,尽量将线程束访问内存组织成对齐合并的方式,这样的效率是最高的。下面看一个例子。
-
一个线程束加载数据,使用一级缓存,并且这个事务所请求的所有数据在一个128字节的对齐的地址段上,具体形式如下图,这里请求的数据是连续的,其实可以不连续,但是不要越界就好。
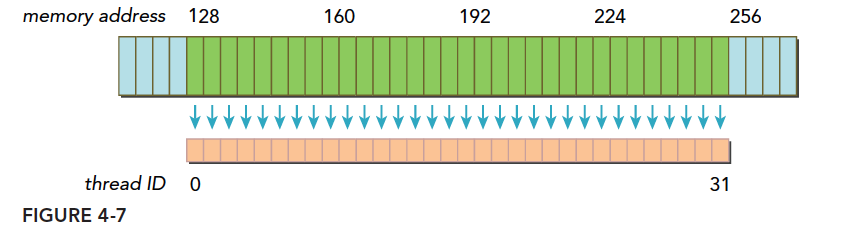
上面蓝色表示全局内存,下面橙色是线程束要的数据,绿色就是对齐的地址段。
-
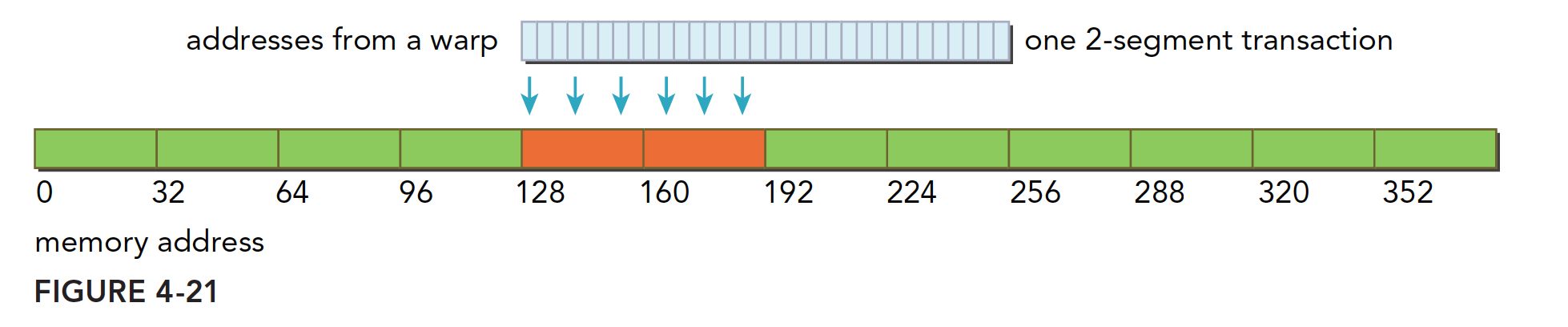
如果一个事务加载的数据分布在不同的对齐地址段上,就会有以下两种情况:
- 连续的,但是不在一个对齐的段上,比如,请求访问的数据分布在内存地址1
128,那么0127和128~255这两段数据要传递两次到SM - 不连续的,也不在一个对齐的段上,比如,请求访问的数据分布在内存地址0
63和128191上,明显这也需要两次加载。
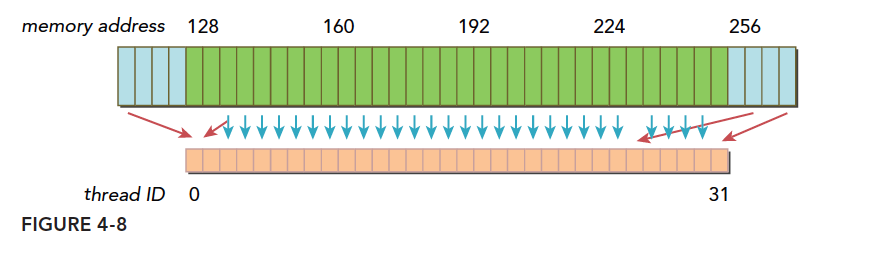
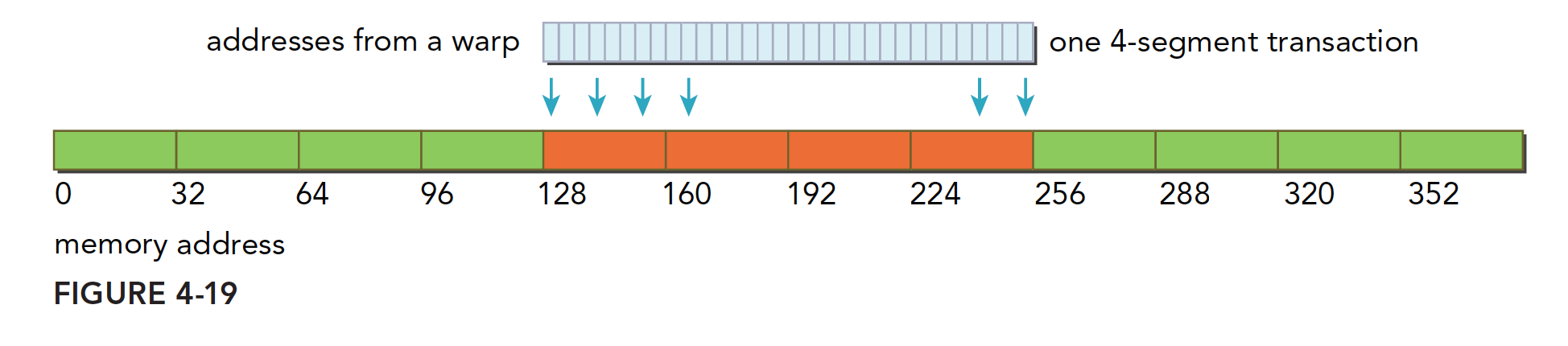
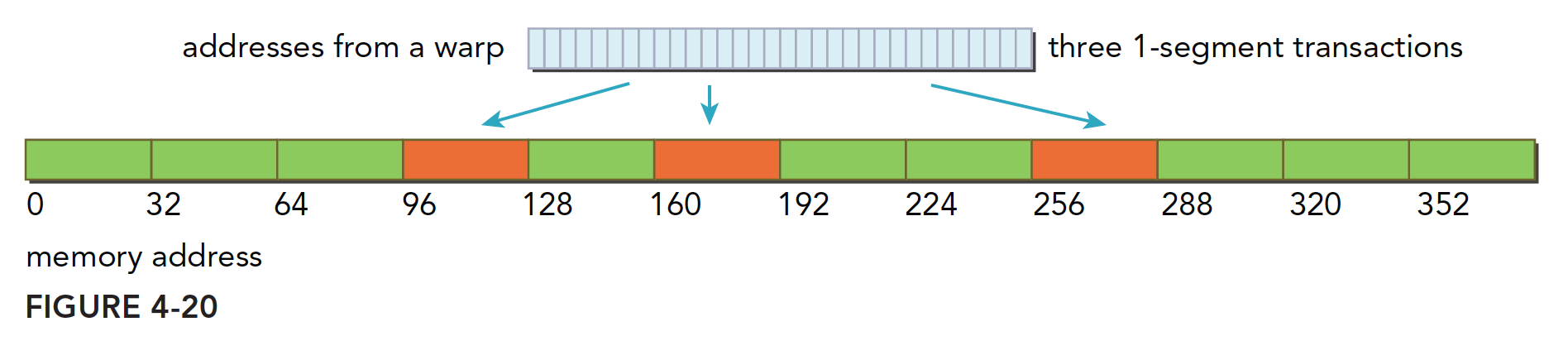
上图就是典型的一个线程束,数据分散开了,thread0的请求在128之前,后面还有请求在256之后,所以需要三个内存事务,而利用率,也就是从主存取回来的数据被使用到的比例,只有128/(128×3)的比例。这个比例低会造成带宽的浪费,最极端的表现,就是如果每个线程的请求都在不同的段,也就是一个128字节的事务只有1个字节是有用的,那么利用率只有1/128。
- 连续的,但是不在一个对齐的段上,比如,请求访问的数据分布在内存地址1
这里总结一下内存事务的优化关键:用最少的事务次数满足最多的内存请求。事务数量和吞吐量的需求随设备的计算能力变化。
全局内存读取
注意我们说的都是读取,也就是加载过程,写或者叫做存储是另外一回事!
SM加载数据,根据不同的设备和类型分为三种路径:
- 一级和二级缓存
- 常量缓存
- 只读缓存
常规��的路径是一级和二级缓存,需要使用常量和只读缓存的需要在代码中显式声明。但是提高性能,主要还是要取决于访问模式。
控制全局加载操作是否通过一级缓存可以通过编译选项来控制,当然比较老的设备可能就没有一级缓存。
编译器禁用一级缓存的选项是:
-Xptxas -dlcm=cg
编译器启用一级缓存的选项是:
-Xptxas -dlcm=ca
当一级缓存被禁用的时候,对全局内存的加载请求直接进入二级缓存,如果二级缓存缺失,则由DRAM完成请求。
每次内存事务可由一个、两个或者四个部分执行,每个部分有32个字节,也就是32,64或者128字节一次(注意前面我们讲到是否使用一级缓存决定了读取粒度是128还是32字节,这里增加的64并不在此情况,所以需要注意)。
启用一级缓存后,当SM有全局加载请求会首先尝试一级缓存,如果一级缓存缺失,则尝试二级缓存,如果二级缓存也没有,那么直接访问DRAM。
在有些设备上一级缓存不用来缓存全局内存访�问,而是只用来存储寄存器溢出的本地数据,比如Kepler的K10,K20。
内存加载可以分为两类:
- 缓存加载
- 没有缓存的加载
内存访问有以下特点:
- 是否使用缓存:一级缓存是否介入加载过程
- 对齐与非对齐:如果访问的第一个地址是32的倍数
- 合并与非合并:访问连续数据块则是合并的
缓存加载
下面是使用一级缓存的加载过程,图片表达很清楚,我们只用少量文字进行说明:
-
对齐合并的访问,利用率100%

-
对齐的,但是不是连续的,每个线程访问的数据都在一个块内,但是位置是交叉的,利用率100%

-
连续非对齐的,线程束请求一个连续的非对齐的32个4字节数据,那么会出现,数据横跨两个块,但是没有对齐,当启用一级缓存的时候,就要两个128字节的事务来完成

-
线程束所有线程请求同一个地址,那么肯定落在一个缓存行范围(缓存行就是主存上一个可以被一次读到缓存中的一段数据),那么如果按照请求的是4字节数据来说,使用一级缓存的利用率是4/128=3.125%

-
比较坏的情况,前面提到过最坏的,就是每个线程束内的线程请求的都是不同的缓存行内,这里比较坏的情况就是,所有数据分布在N个缓存行上,其中1≤N≤32,那么请求32个4字节的数据,就需要N个事务来完成,利用率也是1/N

CPU和GPU的一级缓存有显著的差异,GPU的一级缓存可以通过编译选项等控制,CPU不可以,而且CPU的一级缓存的替换算法是有使用频率和时间局部性的,GPU则没有。
没有缓存的加载
没有缓存的加载是指没有通过一级缓存,二级缓存则是不得不经过的。
当不使用一级缓存的时候,内存事务的粒度变为32字节,更细粒度的好处是提高利用率,这个很好理解,比如你每次喝水只能选择一瓶大瓶500ml的或者一个小瓶的250ml,当你非常渴的时候需要400ml水分,喝大瓶的比较方便,因为如果喝小瓶的一瓶不够,还需要再喝一瓶,此时大瓶的方便。但如果你需要200ml的水分的时候,小瓶的利用率就高很多。细粒度的访问就是用小瓶喝水,虽然体积小,但是每次的利用率都高了不少,针对上面使用缓存的情况5,可能效果会更好。
继续我们的图解:
-
对齐合并访问128字节,不用说,还是最理想的情况,使用4个段,利用率100%

-
对齐不连续访问128字节,都在四个段内,且互不相同,这样的利用率也是100%

-
连续不对齐,一个段32字节,所以,一个连续的128字节的请求,即使不对齐,最多也不会超过五个段,所以利用率是4/5=80%,如果不明白为什么不能超过5个段,请注意前提是连续的,这个时候不可能超过五段

-
所有线程访问一个4字节的数据,那么此时的利用率是4/32=12.5%

-
最坏的情况,所有目标数据分散在内存的各个角落,那么需要N个内存段,此时与使用一级缓存的对比也是有优势的,因为N×128还是要比N×32大不少,这里假设N不会因为128还是32而变化,而实际情况,当使用大粒度的缓存行的时候,N有可能会减小

非对齐读取示例
下面就非对齐读取进行演示,代码如下:
#include <cuda_runtime.h>
#include <stdio.h>
#include "freshman.h"
void sumArrays(float * a, float * b, float * res, int offset, const int size)
{
for(int i = 0, k = offset; k < size; i++, k++)
{
res[i] = a[k] + b[k];
}
}
__global__ void sumArraysGPU(float*a, float*b, float*res, int offset, int n)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int k = i + offset;
if(k < n)
res[i] = a[k] + b[k];
}
int main(int argc, char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int nElem = 1 << 18;
int offset = 0;
if(argc >= 2)
offset = atoi(argv[1]);
printf("Vector size:%d\n", nElem);
int nByte = sizeof(float) * nElem;
float *a_h = (float*)malloc(nByte);
float *b_h = (float*)malloc(nByte);
float *res_h = (float*)malloc(nByte);
float *res_from_gpu_h = (float*)malloc(nByte);
memset(res_h, 0, nByte);
memset(res_from_gpu_h, 0, nByte);
float *a_d, *b_d, *res_d;
CHECK(cudaMalloc((void**)&a_d, nByte));
CHECK(cudaMalloc((void**)&b_d, nByte));
CHECK(cudaMalloc((void**)&res_d, nByte));
CHECK(cudaMemset(res_d, 0, nByte));
initialData(a_h, nElem);
initialData(b_h, nElem);
CHECK(cudaMemcpy(a_d, a_h, nByte, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d, b_h, nByte, cudaMemcpyHostToDevice));
dim3 block(1024);
dim3 grid(nElem/block.x);
double iStart, iElaps;
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, offset, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
CHECK(cudaMemcpy(res_from_gpu_h, res_d, nByte, cudaMemcpyDeviceToHost));
printf("Execution configuration<<<%d,%d>>> Time elapsed %f sec --offset:%d \n", grid.x, block.x, iElaps, offset);
sumArrays(a_h, b_h, res_h, offset, nElem);
checkResult(res_h, res_from_gpu_h, nElem);
cudaFree(a_d);
cudaFree(b_d);
cudaFree(res_d);
free(a_h);
free(b_h);
free(res_h);
free(res_from_gpu_h);
return 0;
}
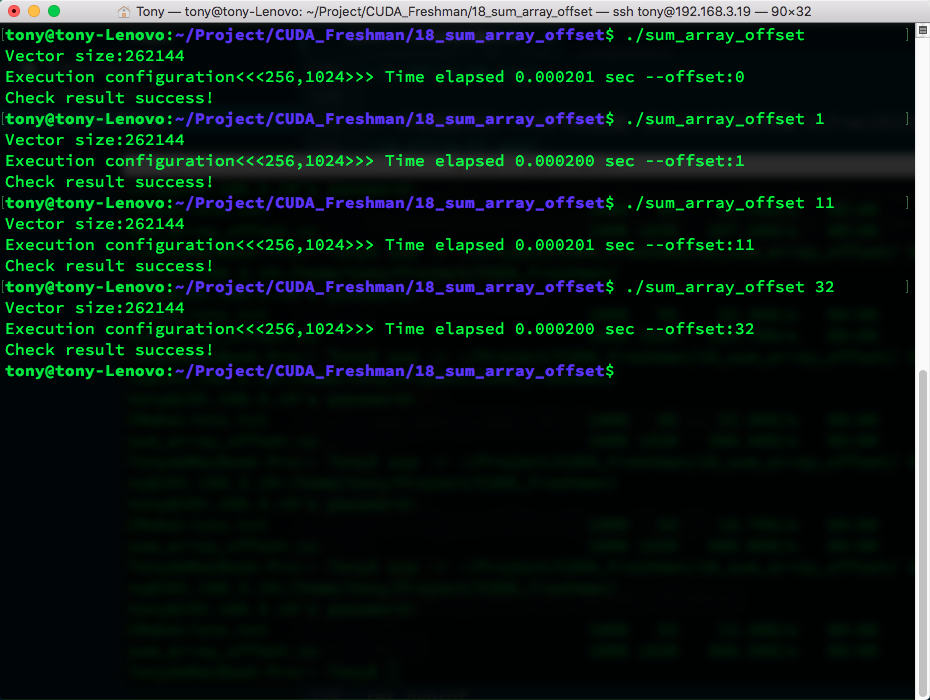
编译指令:
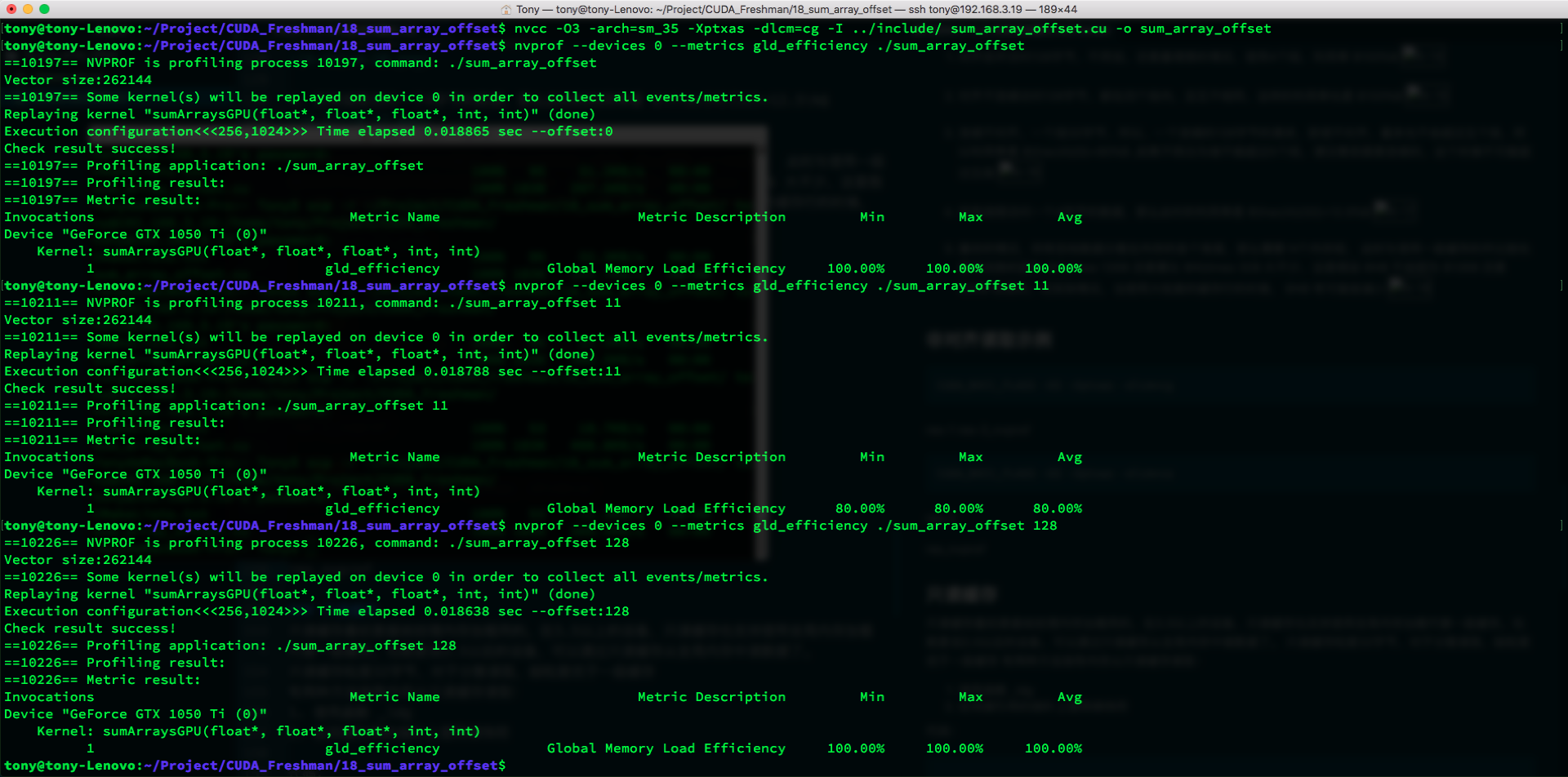
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=cg -I ../include/ sum_array_offset.cu -o sum_array_offset
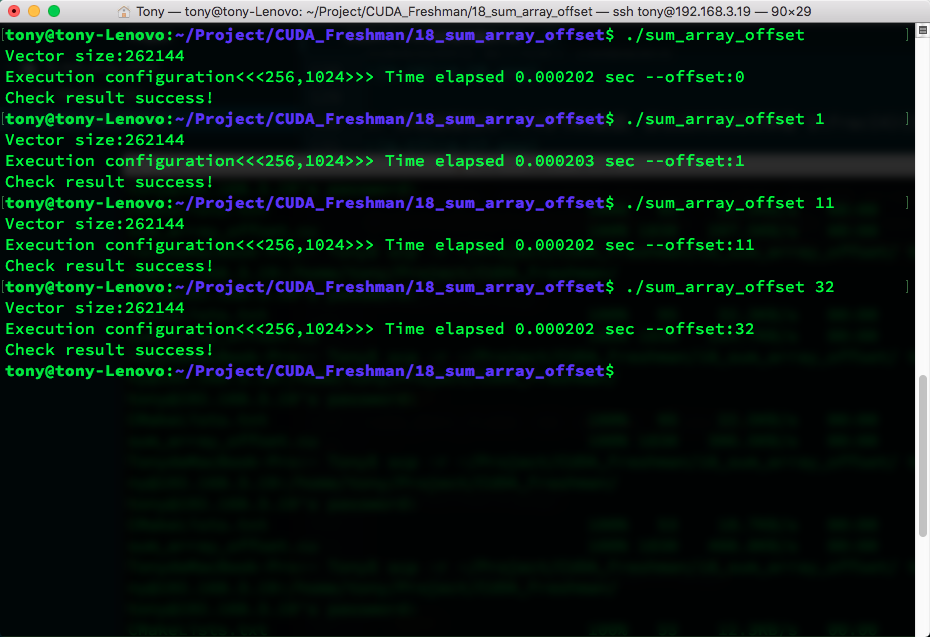
运行结果:
编译指令,启用一级缓存:
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=ca -I ../include/ sum_array_offset.cu -o sum_array_offset
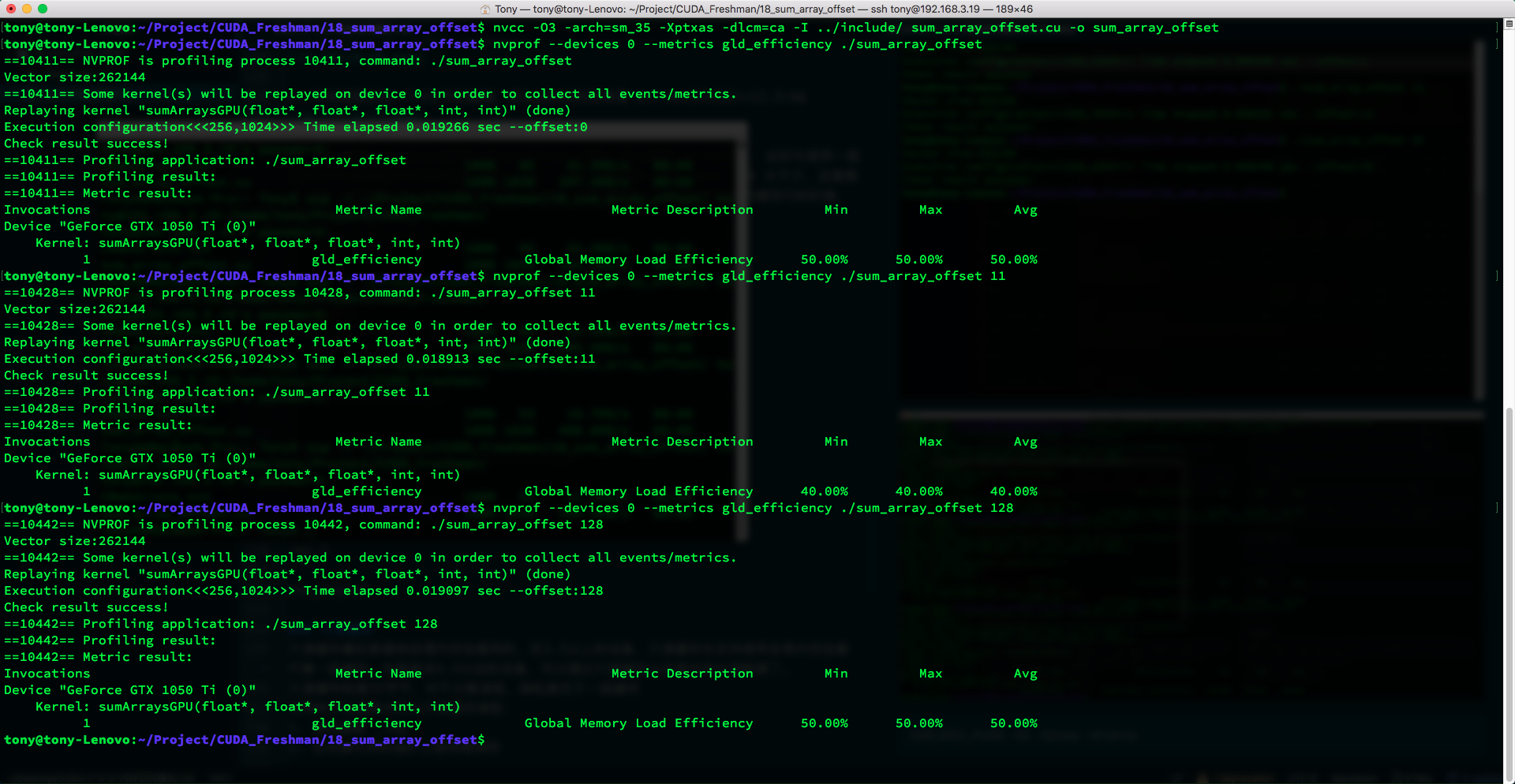
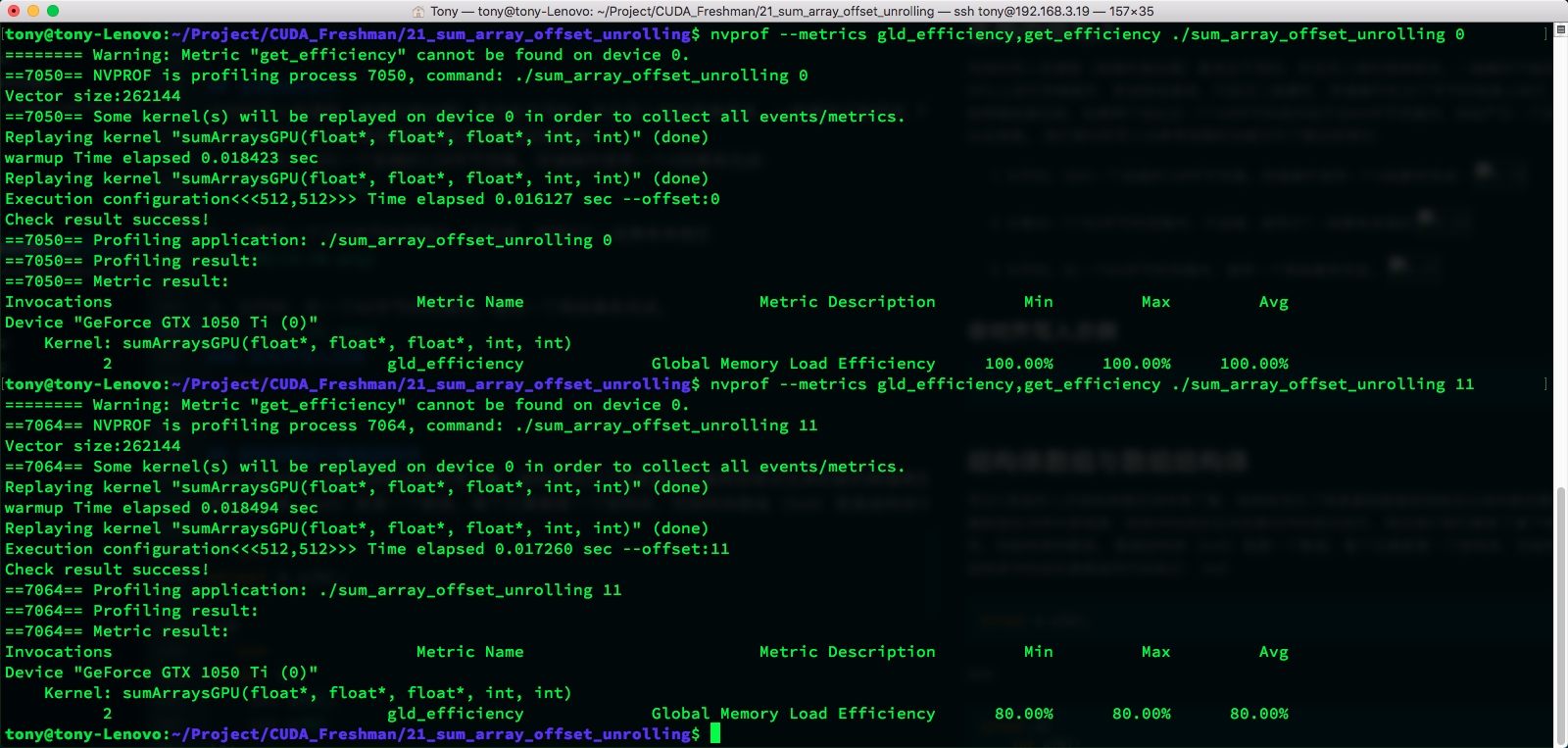
这里我们使用的指标是:
全局加载效率 = 请求的全局内存加载吞吐量 / 所需的全局内存加载吞吐量
只读缓存
只读缓存最初是留给纹理内存加载用的,在计算能力3.5以上的设备,只读缓存也支持使用全局内存加载代替一级缓存。也就是说3.5以后的设备,可以通过只读缓存从全局内存中读数据了。
只读缓存粒度32字节,对于分散读取,细粒度优于一级缓存。
有两种方法指导内存从只读缓存读取:
- 使用函数__ldg
- 在间接引用的指针上使用修饰符
代码:
__global__ void copyKernel(float * in, float* out)
{
int idx = blockDim.x * blockIdx.x + threadIdx.x;
out[idx] = __ldg(&in[idx]);
}
注意函数参数,然后就能强制使用只读缓存了。
全局内存写入
内存的写入和读取(或者叫做加载)是完全不同的,并且写入相对简单很多。一级缓存不能用在Fermi和Kepler GPU上进行存储操作,发送到设备前,只经过二级缓存,存储操作在32个字节的粒度上执行,内存事务也被分为一段、两段或者四段,如果两个地址在一个128字节的段内但不在64字节范围内,则会产生一个四段的事务,其他情况以此类推。
我们将内存写入也参考前面的加载分为下面这些情况:
-
对齐的,访问一个连续的128字节范围。存储操作使用一个4段事务完成:
-
分散在一个192字节的范围内,不连续,使用3个一段事务来完成:
-
对齐的,在一个64字节的范围内,使用一个两段事务完成:
非对齐写入示例
与读取情况类似,且更简单,因为始终不经过一级缓存,所以略过此实验。
结构体数组与数组结构体
写过C语言的人对结构体都应该非常了解,结构体实际上就是基础数据类型组合出来的新的数据类型,这个新的数据类型在内存中表现是:结构中的成员在内存里对齐地依次排开,然后我们就有了接下来的话题,数组的结构体,和结构体的数组。
数组结构体(AoS)就是一个数组,每个元素都是一个结构体,而结构体数组(SoA)就是结构体中的成员是数组,用代码表示:
AoS(数组结构体):
struct A a[N];
SoA(结构体数组):
struct A{
int a[N];
int b[N];
} a;
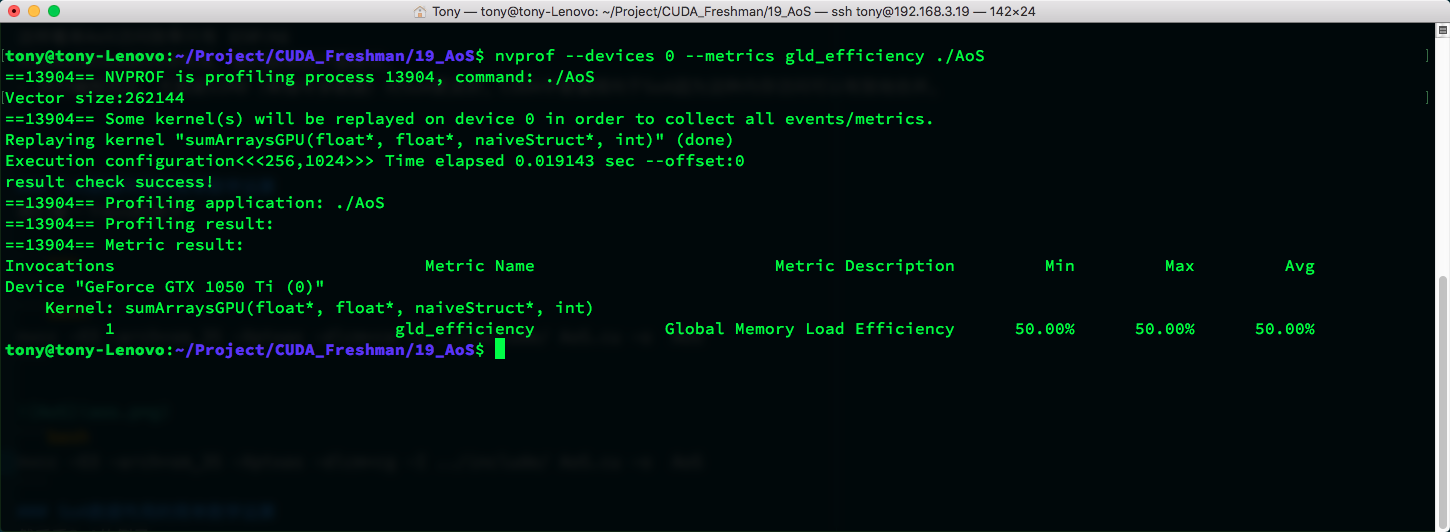
如果你分不清这两个名字,没关系,记住AoS是数组就行了。CUDA对细粒度数组是非常友好的,但是对粗粒度如结构体组成的数组就不太友好了,具体表现在,内存访问利用率低。比如当一个线程要访问结构体中的某个成员的时候,当32个线程同时访问的时候,SoA的访问就是连续的,而AoS则是不连续的:
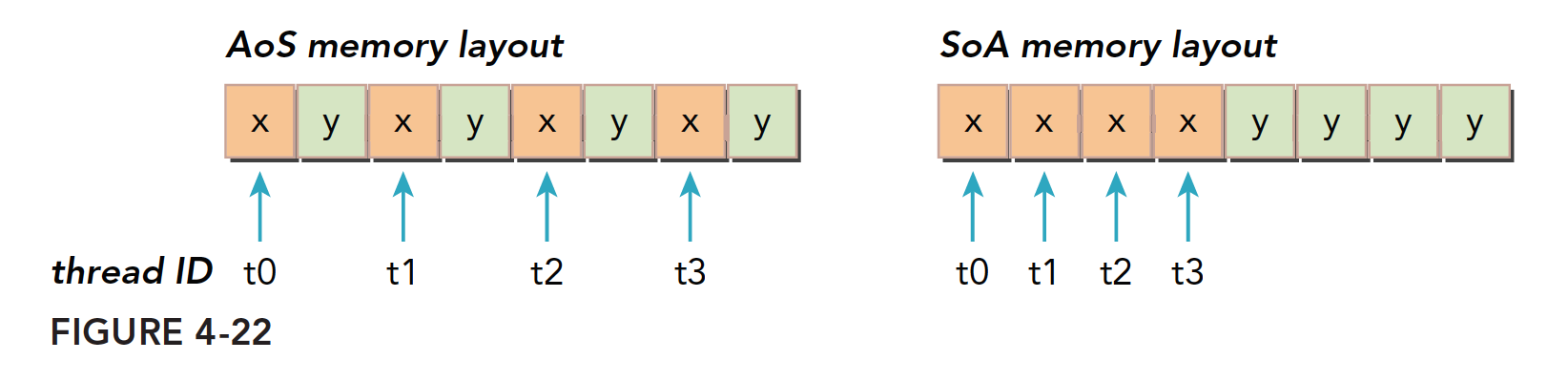
这样看来AoS访问效率只有50%。
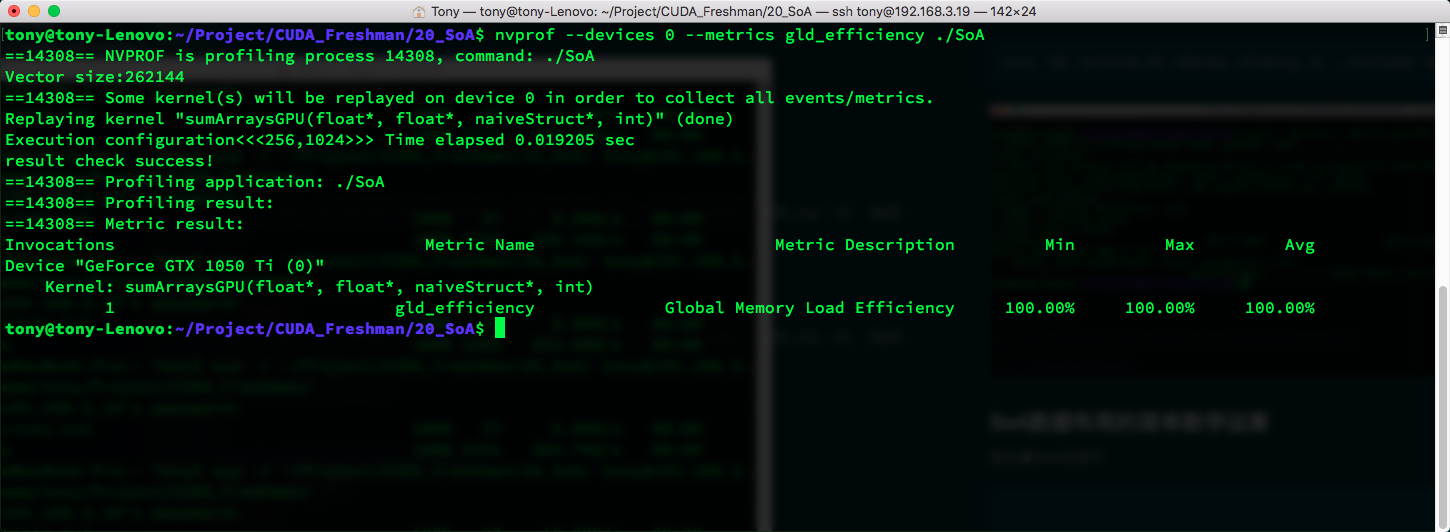
对比AoS和SoA的内存布局,我们能得到下面结论:
- 并行编程范式,尤其是SIMD(单指令多数据)对SoA更友好。CUDA中普遍倾向于SoA,因为这种内存访问可以有效地合并。
AoS数据布局的简单数学运算
我们看一下AoS的例子:
#include <cuda_runtime.h>
#include <stdio.h>
#include "freshman.h"
struct naiveStruct{
float a;
float b;
};
void sumArrays(float * a, float * b, float * res, const int size)
{
for(int i = 0; i < size; i++)
{
res[i] = a[i] + b[i];
}
}
__global__ void sumArraysGPU(float*a, float*b, struct naiveStruct* res, int n)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
if(i < n)
res[i].a = a[i] + b[i];
}
void checkResult_struct(float* res_h, struct naiveStruct*res_from_gpu_h, int nElem)
{
for(int i = 0; i < nElem; i++)
if (res_h[i] != res_from_gpu_h[i].a)
{
printf("check fail!\n");
exit(0);
}
printf("result check success!\n");
}
int main(int argc, char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int nElem = 1 << 18;
int offset = 0;
if(argc >= 2)
offset = atoi(argv[1]);
printf("Vector size:%d\n", nElem);
int nByte = sizeof(float) * nElem;
int nByte_struct = sizeof(struct naiveStruct) * nElem;
float *a_h = (float*)malloc(nByte);
float *b_h = (float*)malloc(nByte);
float *res_h = (float*)malloc(nByte_struct);
struct naiveStruct *res_from_gpu_h = (struct naiveStruct*)malloc(nByte_struct);
memset(res_h, 0, nByte);
memset(res_from_gpu_h, 0, nByte);
float *a_d, *b_d;
struct naiveStruct* res_d;
CHECK(cudaMalloc((void**)&a_d, nByte));
CHECK(cudaMalloc((void**)&b_d, nByte));
CHECK(cudaMalloc((void**)&res_d, nByte_struct));
CHECK(cudaMemset(res_d, 0, nByte_struct));
initialData(a_h, nElem);
initialData(b_h, nElem);
CHECK(cudaMemcpy(a_d, a_h, nByte, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d, b_h, nByte, cudaMemcpyHostToDevice));
dim3 block(1024);
dim3 grid(nElem/block.x);
double iStart, iElaps;
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
CHECK(cudaMemcpy(res_from_gpu_h, res_d, nByte_struct, cudaMemcpyDeviceToHost));
printf("Execution configuration<<<%d,%d>>> Time elapsed %f sec\n", grid.x, block.x, iElaps);
sumArrays(a_h, b_h, res_h, nElem);
checkResult_struct(res_h, res_from_gpu_h, nElem);
cudaFree(a_d);
cudaFree(b_d);
cudaFree(res_d);
free(a_h);
free(b_h);
free(res_h);
free(res_from_gpu_h);
return 0;
}
编译指令:
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=ca -I ../include/ AoS.cu -o AoS
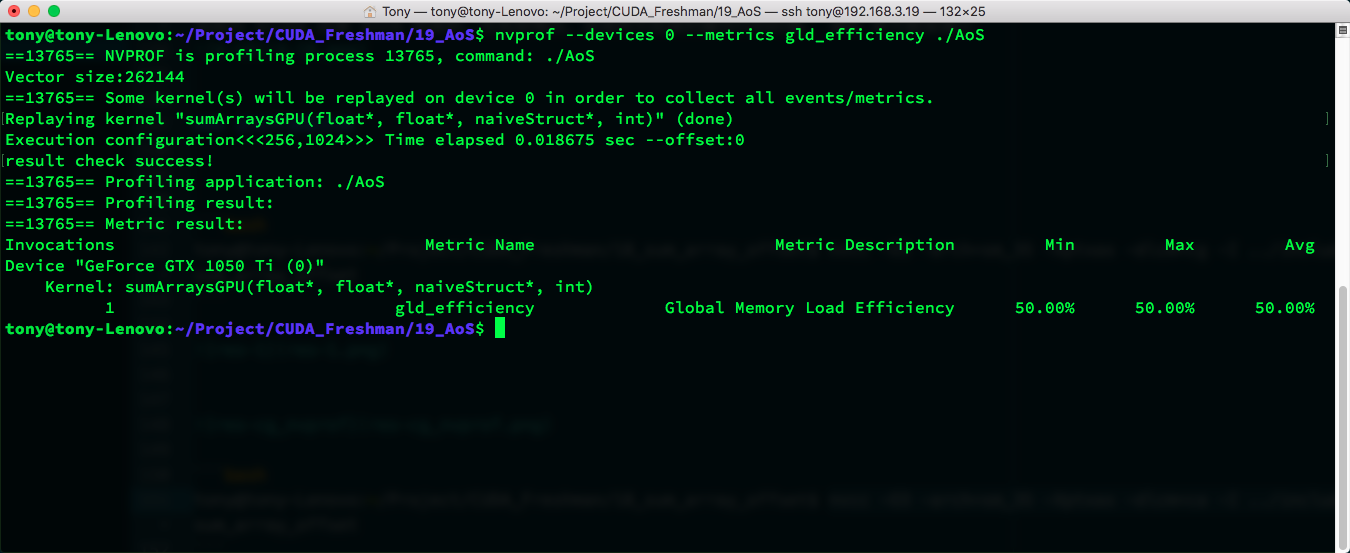
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=cg -I ../include/ AoS.cu -o AoS
SoA数据布局的简单数学运算
然后看SoA的例子:
#include <cuda_runtime.h>
#include <stdio.h>
#include "freshman.h"
void sumArrays(float * a, float * b, float * res, int offset, const int size)
{
for(int i = 0, k = offset; k < size; i++, k++)
{
res[i] = a[k] + b[k];
}
}
__global__ void sumArraysGPU(float*a, float*b, float*res, int offset, int n)
{
int i = blockIdx.x * blockDim.x * 4 + threadIdx.x;
int k = i + offset;
if(k + 3 * blockDim.x < n)
{
res[i] = a[k] + b[k];
res[i + blockDim.x] = a[k + blockDim.x] + b[k + blockDim.x];
res[i + blockDim.x * 2] = a[k + blockDim.x * 2] + b[k + blockDim.x * 2];
res[i + blockDim.x * 3] = a[k + blockDim.x * 3] + b[k + blockDim.x * 3];
}
}
int main(int argc, char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int block_x = 512;
int nElem = 1 << 18;
int offset = 0;
if(argc == 2)
offset = atoi(argv[1]);
else if(argc == 3)
{
offset = atoi(argv[1]);
block_x = atoi(argv[2]);
}
printf("Vector size:%d\n", nElem);
int nByte = sizeof(float) * nElem;
float *a_h = (float*)malloc(nByte);
float *b_h = (float*)malloc(nByte);
float *res_h = (float*)malloc(nByte);
float *res_from_gpu_h = (float*)malloc(nByte);
memset(res_h, 0, nByte);
memset(res_from_gpu_h, 0, nByte);
float *a_d, *b_d, *res_d;
CHECK(cudaMalloc((void**)&a_d, nByte));
CHECK(cudaMalloc((void**)&b_d, nByte));
CHECK(cudaMalloc((void**)&res_d, nByte));
CHECK(cudaMemset(res_d, 0, nByte));
initialData(a_h, nElem);
initialData(b_h, nElem);
CHECK(cudaMemcpy(a_d, a_h, nByte, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d, b_h, nByte, cudaMemcpyHostToDevice));
dim3 block(block_x);
dim3 grid(nElem/block.x);
double iStart, iElaps;
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, offset, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
printf("warmup Time elapsed %f sec\n", iElaps);
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, offset, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
CHECK(cudaMemcpy(res_from_gpu_h, res_d, nByte, cudaMemcpyDeviceToHost));
printf("Execution configuration<<<%d,%d>>> Time elapsed %f sec --offset:%d \n", grid.x, block.x, iElaps, offset);
sumArrays(a_h, b_h, res_h, offset, nElem);
checkResult(res_h, res_from_gpu_h, nElem - 4 * block_x);
cudaFree(a_d);
cudaFree(b_d);
cudaFree(res_d);
free(a_h);
free(b_h);
free(res_h);
free(res_from_gpu_h);
return 0;
}
编译指令:
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=ca -I ../include/ SoA.cu -o SoA
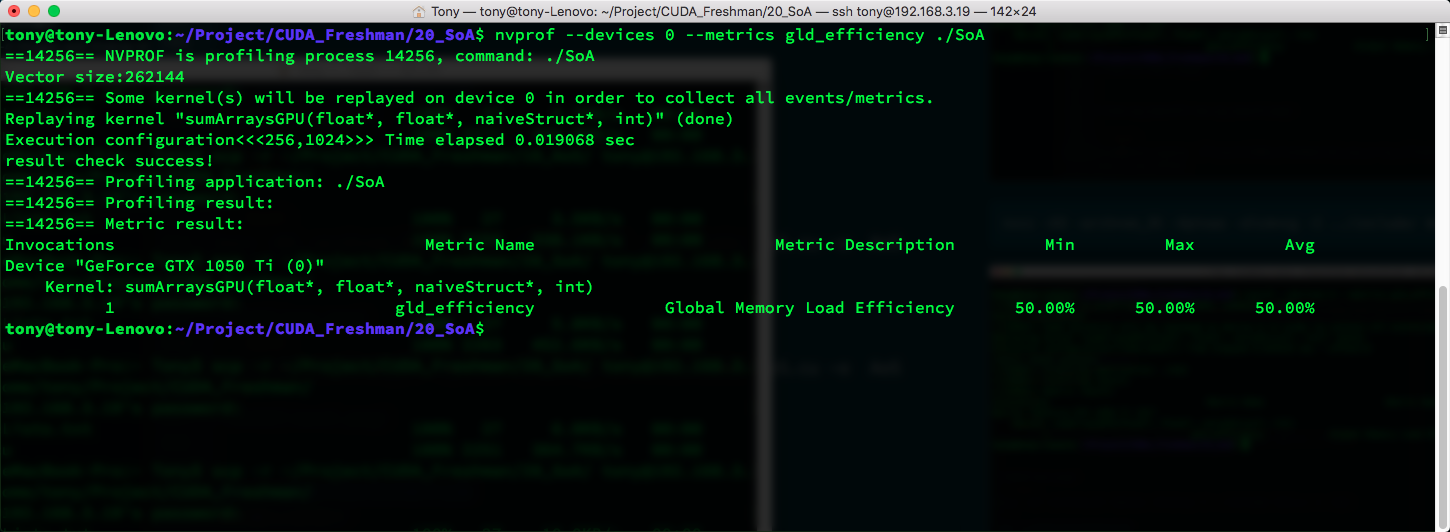
nvcc -O3 -arch=sm_35 -Xptxas -dlcm=cg -I ../include/ SoA.cu -o SoA
性能调整
优化设备内存带宽利用率有两个目标:
- 对齐合并内存访问,以减��少带宽的浪费
- 足够的并发内存操作,以隐藏内存延迟
第三章我们讲过优化指令吞吐量的核函数,实现并发内存访问量最大化是通过以下方式得到的:
- 增加每个线程中执行独立内存操作的数量
- 对核函数启动的执行配置进行试验,以充分体现每个SM的并行性
接下来我们就按照这个思路对程序进行优化试验:展开技术和增大并行性。
展开技术
把前面讲到的展开技术用到向量加法上,我们来看看其对内存效率的影响:
代码:
#include <cuda_runtime.h>
#include <stdio.h>
#include "freshman.h"
void sumArrays(float * a, float * b, float * res, int offset, const int size)
{
for(int i = 0, k = offset; k < size; i++, k++)
{
res[i] = a[k] + b[k];
}
}
__global__ void sumArraysGPU(float*a, float*b, float*res, int offset, int n)
{
int i = blockIdx.x * blockDim.x * 4 + threadIdx.x;
int k = i + offset;
if(k + 3 * blockDim.x < n)
{
res[i] = a[k] + b[k];
res[i + blockDim.x] = a[k + blockDim.x] + b[k + blockDim.x];
res[i + blockDim.x * 2] = a[k + blockDim.x * 2] + b[k + blockDim.x * 2];
res[i + blockDim.x * 3] = a[k + blockDim.x * 3] + b[k + blockDim.x * 3];
}
}
int main(int argc, char **argv)
{
int dev = 0;
cudaSetDevice(dev);
int block_x = 512;
int nElem = 1 << 18;
int offset = 0;
if(argc == 2)
offset = atoi(argv[1]);
else if(argc == 3)
{
offset = atoi(argv[1]);
block_x = atoi(argv[2]);
}
printf("Vector size:%d\n", nElem);
int nByte = sizeof(float) * nElem;
float *a_h = (float*)malloc(nByte);
float *b_h = (float*)malloc(nByte);
float *res_h = (float*)malloc(nByte);
float *res_from_gpu_h = (float*)malloc(nByte);
memset(res_h, 0, nByte);
memset(res_from_gpu_h, 0, nByte);
float *a_d, *b_d, *res_d;
CHECK(cudaMalloc((void**)&a_d, nByte));
CHECK(cudaMalloc((void**)&b_d, nByte));
CHECK(cudaMalloc((void**)&res_d, nByte));
CHECK(cudaMemset(res_d, 0, nByte));
initialData(a_h, nElem);
initialData(b_h, nElem);
CHECK(cudaMemcpy(a_d, a_h, nByte, cudaMemcpyHostToDevice));
CHECK(cudaMemcpy(b_d, b_h, nByte, cudaMemcpyHostToDevice));
dim3 block(block_x);
dim3 grid(nElem/block.x);
double iStart, iElaps;
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, offset, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
printf("warmup Time elapsed %f sec\n", iElaps);
iStart = cpuSecond();
sumArraysGPU<<<grid, block>>>(a_d, b_d, res_d, offset, nElem);
cudaDeviceSynchronize();
iElaps = cpuSecond() - iStart;
CHECK(cudaMemcpy(res_from_gpu_h, res_d, nByte, cudaMemcpyDeviceToHost));
printf("Execution configuration<<<%d,%d>>> Time elapsed %f sec --offset:%d \n", grid.x, block.x, iElaps, offset);
sumArrays(a_h, b_h, res_h, offset, nElem);
checkResult(res_h, res_from_gpu_h, nElem - 4 * block_x);
cudaFree(a_d);
cudaFree(b_d);
cudaFree(res_d);
free(a_h);
free(b_h);
free(res_h);
free(res_from_gpu_h);
return 0;
}
编译指令:
nvcc -O3 sum_array_offset_unrolling.cu -o sum_array_offset_unrolling -arch=sm_35 -Xptxas -dlcm=cg -I ../include/
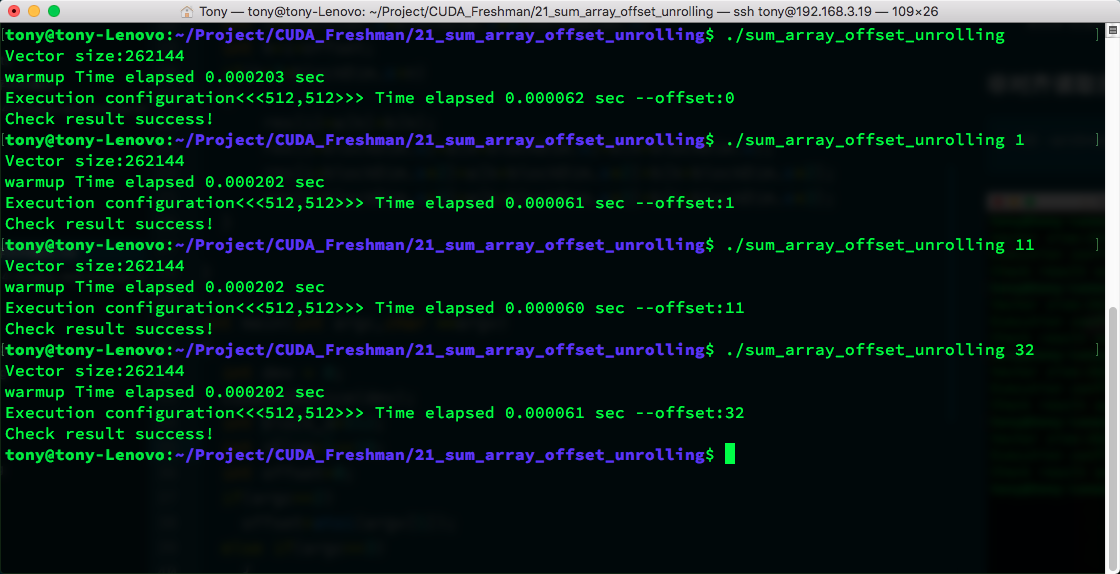
nvprof内存效率:
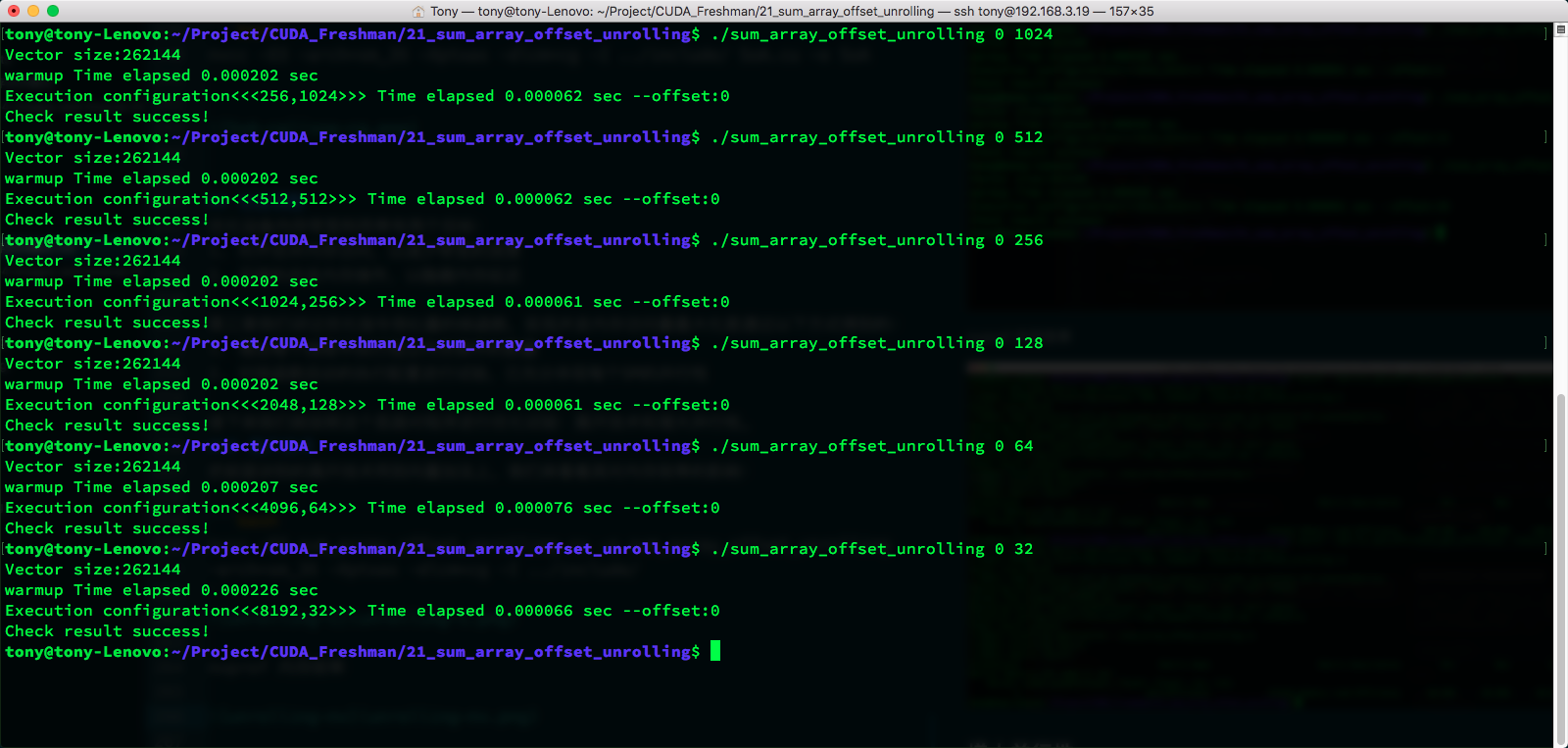
增大并行性
通过调整块的大小来实现并行性调整,也是前面讲过的套路,我们关注的还是内存利用效率。
代码同上面的展开技术。
offset=11的时候:
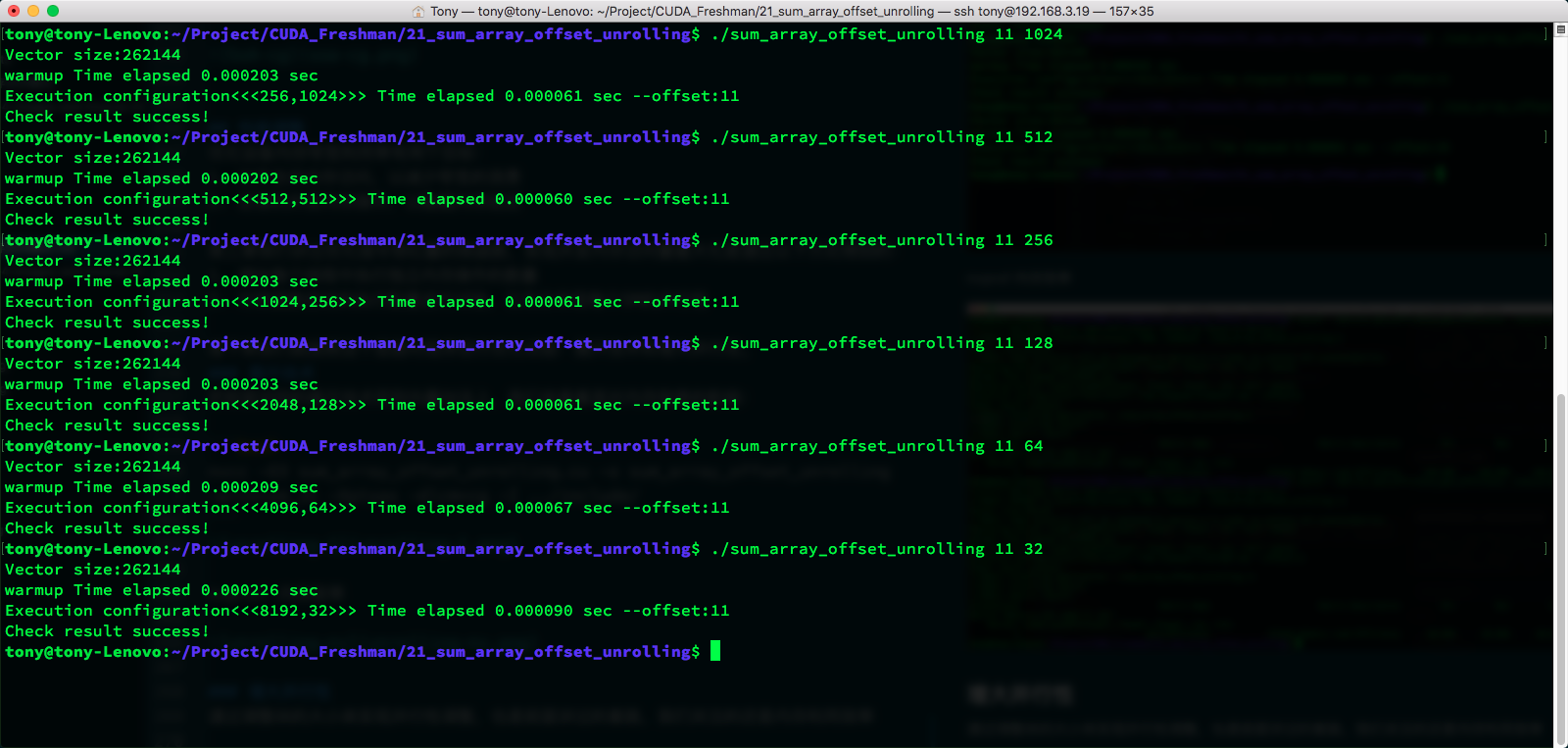
由于数据量相对较小,所以时间差距不大,512有最佳速度,不仅因为内存,还有并行性等多方面因素,这个前面我们也曾提到过。要看综合能力。
本文全部代码都在Github上有完整版,请访问:https://github.com/Tony-Tan/CUDA_Freshman
总结
这是我今年写作时间最长的一篇博客,写了三天,主要是代码比较多,结果也比较多。这里我们没用CMake,而是用的指令,原因是方便修改编译选项,试验时间结果不明显的原因是数据量小,部分结果和书上不一致,主要是书的时间比较久了,GPU换代太快。
全局内存本篇算是比较完整了,后面还有其他内存知识,我们继续。